ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 63-051-05 |
|
Наименование проекта Способ автоматического управления торможением транспортной машины и устройство для его осуществления |
|
Назначение Для повышения эффективности торможения транспортной машины за счет формирования автоматического управления на основе адаптивных методов оценивания вектора состояния системы затормаживаемое колесо-дорога |
|
Рекомендуемая область применения Легковые и грузовые автомобили, автобусы, автопоезда, колесные и гусеничные машины специального назначения |
|
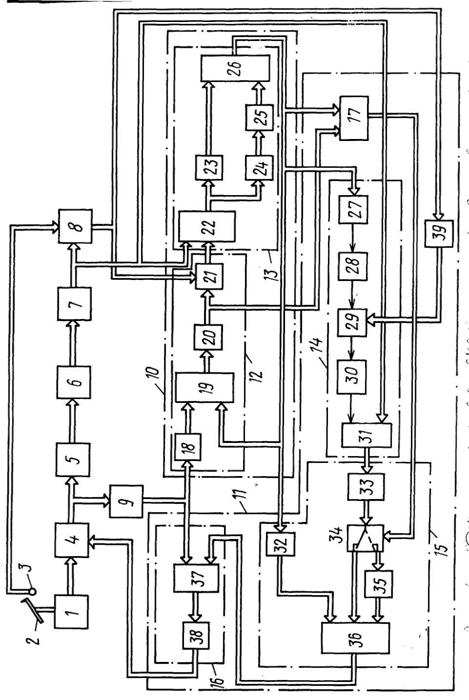
Описание Результат выполнения технологической разработки Данный способ заключается в том, что в процессе торможения непрерывно оценивают моменты сил торможения каждого затормаживаемого колеса, определяют оценку суммарной тормозной силы, действующей на транспортную машину, и оценку скорости движения транспортной машины при, заданном постоянном уровне проскальзывания для каждого затормаживаемого колеса определяют оценку заданной скорости колеса, сравнивают заданную скорость колеса с фактической скоростью колеса и определяют сигнал ошибки регулирования скорости для каждого затормаживаемого колеса, с использованием оценок момента сил торможения и ошибок регулирования скорости определяют заданное давление в тормозном приводе каждого затормаживаемого колеса, сравнивают заданное давление с фактическим давлением в тормозном приводе каждого затормаживаемого колеса и по сигналу ошибки формируют управляющие сигналы, которые подают на модуляторы давления каждого затормаживаемого колеса. Поставленная цель достигается также за счет того, что в процессе торможения при проскальзываниях колеса меньше заданного значения оценивают наличие максимума момента силы торможения для каждого затормаживаемого колеса и при наличии максимума принимают составляющую заданного давления, зависящую от ошибки регулирования скорости колеса, со знаком минус при замедлении колеса и со знаком плюс при ускорении колеса. Реализуется способ устройством автоматического управления торможением транспортной машины. Устройство содержит тормозной кран 1 (см. рисунок 1), связанный с педалью торможения 2, датчик исходного положения педали торможения 3, модулятор давления 4, тормозной механизм 5, затормаживаемое колесо 6, датчик скорости колеса 7, устройство выборки-хранения 8, датчик давления 9, блок оценки вектора состояния затормаживаемого колеса 10, управляющее устройство 11. Блок оценки вектора состояния затормаживаемого колеса 10 содержит блок формирования сигнала оценки скорости колеса 12 и блок формирования сигнала оценки момента силы торможения 13. Управляющее устройство 11 содержит блок формирования сигнала ошибки регулирования скорости колеса 14, блок 15 формирования сигнала заданного давления в тормозном приводе колеса, блок формирования управляющего сигнала 16 и детектор максимума 17. Блок формирования сигнала оценки скорости колеса 1 содержит усилительный элемент 18, элемент сравнения 19, усилительный элемент 20, интегратор 21. Блок формирования сигнала оценки момента силы торможения 13 содержит элемент сравнения 22, усилительный элемент 23, усилительный элемент 4, интегратор 25 и суммирующий элемент 26. блок формирования сигнала ошибки регулирования скорости колеса 14 содержит суммирующий элемент 27, усилительный элемент 28, интегратор 29, усилительный элемент 30 и элемент сравнения 31. Блок формирования сигнала заданного давления в тормозном приводе 15 содержит усилительный элемент 32, интегратор 33, коммутационное устройство 34, инвертор 35 и суммирующий элемент 36. Блок формирования управляющего сигнала 16 содержит суммирующий элемент 37 и усилительный элемент 38. Управляющий блок 11 содержит также вычислитель 39 скорости транспортной машины в начале торможения, связанный входом с выходом устройства выборки-хранения 8, а выходом с входом начального условия интегратора 29. Устройство выборки-хранения 8 связано выходом также с входом начального условия интегратора 21 блока 12 блока оценки вектора состояния 10. Устройство автоматического управления торможением транспортной машины работает следующим образом. При воздействии на педаль торможения 2 давление с выхода тормозного крана 1 через модуляторы 4 подается в тормозные механизмы 5 каждого затормаживаемого колеса. тормозные механизмы создают тормозные моменты М тi, под действием которых каждое затормаживаемое колесо уменьшает свою скорость. Давление в тормозном приводе каждого затормаживаемого колеса измеряется с помощью датчика 9, скорость каждого затормаживаемого колеса измеряется с помощью датчика 7. В начале воздействия на педаль по сигналу с датчика 3 исходного положения педали устройство выборки-хранения 8 фиксирует сигнал, пропорциональный скорости колеса 12 в начале торможения. Этот сигнал вводится в интегратор 21 блока формирования сигнала оценки скорости колеса блока оценки вектора состояния 10 как начальное условие. По средней скорости колес в начале торможения вычислитель 39 определяет скорость транспортной машины в начале торможения, значение которой вводится как начальное условие в интегратор 29 блока 14 формирования сигнала ошибки регулирования скорости колеса. Сигналы на выходе усилителей 18 блока 12 пропорциональны тормозному моменту каждого затормаживаемого колеса. Блок оценки вектора состояния 10 каждого затормаживающего колеса, получая на входе информацию о действующем тормозном моменте М
тiи скорости затормаживаемого колесаv
ki, непрерывно выдает на выходе суммирующего элемента 26 блока оценки вектора состояния 10 сигнал, пропорциональный действующему на затормаживаемое колесо моменту силы торможения
Этот сигнал пропорционален первой составляющей заданного давленияr31iв тормозном приводе каждого затормаживаемого колеса. Сигнал с выхода сумматора 26 блока оценки вектора состояния 10 каждого затормаживаемого колеса поступает также на вход сумматора 27 блока 14 формирования сигнала ошибки регулирования скорости колеса управляющего устройства 11. Суммарный сигнал, пропорциональный сумме моментов сил торможения всех затормаживаемых колес, через усилитель 28 подается на вход интегратора 29. На выходе интегратора 29 получается сигнал, пропорциональный оценке скорости транспортной машины
При
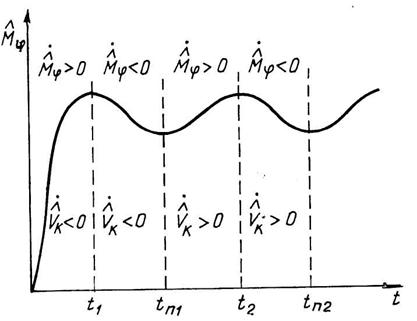
( Скорости затормаживаемых колес изменяется так, что их относительные проскальзывания находятся вблизи заданного проскальзывания или вблизи оптимального (критического) проскальзыванияs ki, соответствующего максиму функции М i(s i). При изменении коэффициента сцепления любого из затормаживаемых колес соответствующий блок оценки вектора состояния 10 отслеживает это изменение. При этом изменяется заданное давление в тормозном приводе соответствующего колеса, за счет чего обеспечивается адаптивные свойства системе автоматического торможения и высокая эффективность торможения. Данная разработка использована в инновационном проекте «Бортовой регулятор скорости транспортных машин», представленном наvМосковском международном салоне инноваций и инвестиций.
Рис. 1. Функциональная схема устройства автоматического управления торможением транспортной машины
Рис. 2. График функционирования системы автоматического управления торможением |
|
Преимущества перед известными аналогами При использовании данного способа система автоматического управления торможением адаптивна к изменениям сцепления колеса и к характеру изменения момента сил сцепления в зависимости от проскальзывания колеса |
|
Стадия освоения Опробовано в условиях опытной эксплуатации |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Годовой экономический эффект от внедрения составил 1,2 млн. руб. |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 22.07.2005 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии