ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 08-084-05 |
|
Наименование проекта Способ формирования колонны из индивидуально движущихся объектов |
|
Назначение Техническая организация безопасного дорожного движения на автомагистралях |
|
Рекомендуемая область применения Автомобильные и железнодорожные дорожно-транспортные службы |
|
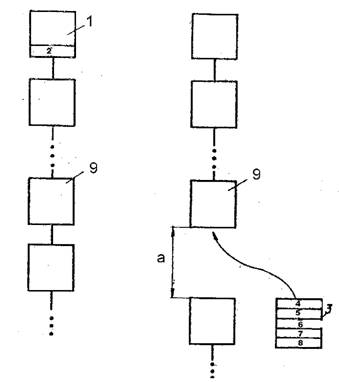
Описание Результат выполнения технологической разработки. Способ формирования колонны из индивидуально движущихся объектов представлен рисунками 1 и 2.
Рис. 1 Рис. 2 На рис. 1 показано состояние колонны до включения в нее индивидуально движущегося объекта, на рис. 2 - состояние колонны в момент вхождения в нее индивидуально движущегося объекта. Колонна самоходных объектов, сформированная на основании предлагаемого способа, состоит из тягача-лидера 1 с центральной электронной системой 2 управления, индивидуальных объектов 3 с электронными системами 4 управления, приводами 5, тормозными системами 6, системами навигации 7 и системами стыковки 8. Способ осуществляют следующим образом. По трассе, например, по автомагистрали в определенном направлении движется ведущий тягач-лидер 1 или колонна индивидуально движущихся объектов с лидером во главе. При входе на трассу индивидуально движущийся объект 3 подает информацию о маршруте движения и основных технических характеристиках (скорость, ускорение, масса, мощность, затрачиваемая на его передвижение, и т.д.) в электронную систему 2 лидера 1. В электронной системе 2 лидера 1 определяют затрачиваемую в данный момент мощность для транспортировки колонны и сравнивают с допустимой нагрузкой. Далее определяют резерв мощности или резерв нагрузки. Если резерв мощности или нагрузки больше, чем мощность или нагрузка, потребная для передвижения индивидуально движущегося объекта, то через электронные системы 2 и 4 запрашивают маршрут движения индивидуального объекта 3, а затем с помощью электронной системы 2 лидера 1, последовательно перебирая маршруты движения объектов, уже включенных в колонну, выбирают объект, например 9, маршрут которого наиболее близок к маршруту индивидуально движущегося объекта 3. Определяют расстояние «а», необходимое для входа индивидуально движущегося объекта 3 в колонну за выбранным объектом 9. Указанное расстояние определяют в зависимости от габаритов объекта 3 и скоростей движения. Для определения принято, что расстояние «а» должно быть равно не менее утроенной длины индивидуально движущегося объекта 3. Далее осуществляют расстыковку части колонны, следующей за выбранным объектом 9. Для этого с помощью электронных систем 2 и 4, приводов 5 и тормозных систем 6 уменьшают скорость отстыкованной части колонны, постоянно сравнивая расстояние между расстыкованными частями с определенным ранее расстоянием «а». Уменьшение скорости осуществляют до тех пор, пока расстояние между расстыкованными частями не станет равным расстоянию «а». После этого скорость отстыкованной части увеличивают до первоначального значения. С помощью системы навигации 7 осуществляют ввод индивидуально движущегося объекта 3 в цепь колонны и с помощью системы стыковки 8 пристыковывают его к выбранному объекту 9. Затем сначала увеличивают, а потом уменьшают скорость отстыкованной части колонны, постоянно с помощью электронных систем 2 и 4 контролируя расстояние между расстыкованной частью колонны и объектом 3, уже состыкованным с другой частью колонны, до полного сближения частей колонны. После полного сближения их с помощью системы стыковки 8 осуществляют стыковку отстыкованной ранее части колонны к объекту 3. Далее привод 5 объекта 3 выключается. Движение осуществляется за счет мощности тягача-лидера 1. При продольном положительном уклоне автомагистрали, если мощность лидера 1 оказывается недостаточной, а это определяется с помощью его электронной системы управления 2, происходит автоматическое включение привода второго объекта. По мере необходимости - 3-го, 4-го и так далее. При спуске или в момент остановки тормозная система 6 включается в обратном порядке: сначала последнего, затем, в случае необходимости, которая определяется с помощью электронной системы управления 4 индивидуального объекта, предпоследнего и так далее. Системы управления 2 и 4 осуществляют включение приводов 5 или включение тормозных систем 6 индивидуальных объектов 3 в зависимости от ускорения группы, усилий в системах стыковки 8, а также от необходимой коррекции их траекторий движения. Лидер-тягач может быть исполнен как в виде автомобиля, так и в виде электромобиля, причем как в автономном исполнении, так и с внешним электропитанием. Предложенный способ позволяет включать в движущуюся колонну в любой момент времени и в произвольной точке трассы индивидуально движущийся объект, если резерв мощности лидера достаточен. То, что в предлагаемом способе осуществляется выбор места входа индивидуально движущегося объекта в колонну, существенно повышает эффективность предлагаемого способа . В результате указанного порядка вхождения объектов в колонну расстыковка объектов и выход их из колонны будут происходить последовательно, начиная с хвоста колонны, причем без участия электронной системы 2 лидера i. Это значительно удобнее, чем если бы стыковка объектов происходила последовательно без учета их маршрутов движения. В этом случае выход объектов из колонны происходил бы из разных точек колонны, т.е. электронная система 2 лидера 1 должна была участвовать как в процессе стыковки при входе объектов в колонну (имеется ввиду контроль и сопоставление резервной и потребной мощности или нагрузки), так и в процессе выхода объектов из колонны, осуществляя расстыковку колонны, выход объекта из цепи колонны и стыковку расстыкованных частей колонны. В предложенном способе, как уже отмечалось, электронная система 2 лидера 1 в процессе выхода объекта из колонны не участвует, за исключением экстремальных ситуаций. Кроме того, предлагаемый способ позволяет существенно экономить топливо. При движении по горизонтальным автомагистралям работает лишь привод тягача-лидера 1. Приводы индивидуальных объектов в указанный период выключаются. Расход топлива тягача существенно меньше суммарного расхода топлива индивидуальных объектов. Это связано, например, с тем, что коэффициент полезного действия тягача существенно больше приведенного коэффициента полезного действия индивидуальных объектов, который равен произведению коэффициентов полезного действия отдельных объектов. Кроме того, в этот период не происходит износ деталей привода индивидуальных объектов. Этот фактор становится все более существенным при увеличении длины маршрута. Существенным также является значительное уменьшение экологического воздействия вследствие уменьшения выхлопа по указанным причинам. Если тягач-лидер выполнен в виде электромобиля, такое воздействие практически отсутствует. И, наконец, социальный, фактор, связанный с тем, что уменьшается утомление водителей индивидуальных объектов, особенно в ночное время, непогоду и при длительных переездах. Все это также повышает безопасность движения, так как вероятность отказа тягача-лидера значительно меньше суммарной вероятности отказов индивидуальных объектов. Кроме того, при связывании потока индивидуальных объектов в колонну резко снижается вероятность дорожно-транспортных происшествий из-за сокращения количества активных участников движения. Включение приводов, начиная с головы автопоезда, или включение при необходимости тормозных систем индивидуальных объектов с хвоста автопоезда обеспечивает наличие в главных стыковочных элементах только растягивающих механических условий. Это позволяет упростить конструкцию и уменьшить металлоемкость стыковочных элементов, а значит, повысить эффективность всей системы. Число тягачей-лидеров 1 может быть и более одного. Это определяется в зависимости от параметров трассы (автомагистрали), интенсивности движения в конкретный период времени и некоторыми другими факторами. |
|
Преимущества перед известными аналогами Разработанная универсальная, удобная технология движения объектов с разными маршрутами, методы определения, сравнения и изменения скоростей объектов, их регулирование в процессе перемещения по трассе |
|
Стадия освоения Опробовано в условиях опытной эксплуатации |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Повышение безопасности движения на дорогах, экономия топлива, улучшение экономической обстановки. Повышение эффективности транспортных систем в 2 и более раз |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 28.10.2005 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии