ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 30-037-04 |
|
Наименование проекта Механизированный стеллаж |
|
Назначение Складирование с максимальным заполнением объема накопления и механизированной подачей штучных грузов к месту их загрузки и выгрузки. |
|
Рекомендуемая область применения Грузоподъемное оборудование |
|
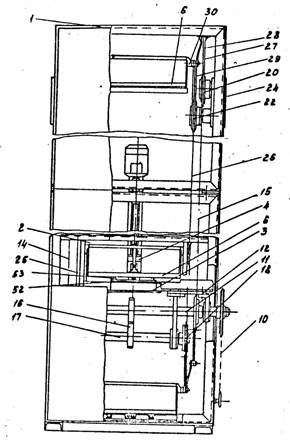
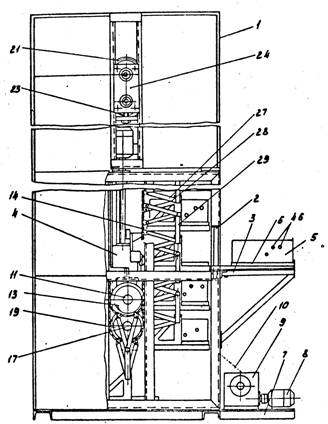
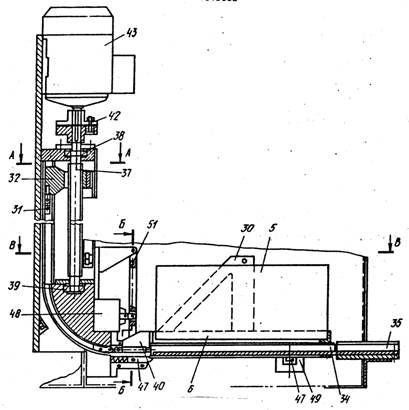
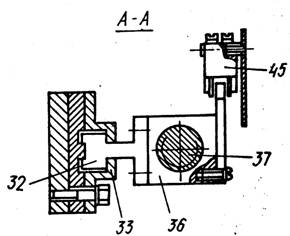
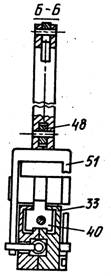
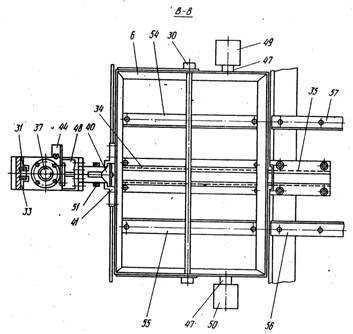
Описание Результат выполнения конструкторской разработки. Сущность изобретения: механизированный стеллаж содержит раму, имеющую окно и размещенный в зоне последнего приемный стол, огибающие приводные и натяжные звездочки, расположенные верти кально замкнутые тяговые цепи подвески,связанные с упомянутыми цепями посредством системы рычагов, установленные наподвесках выдвижные поддоны для ящиков,приспособления для ориентации подвесок ввертикальной плоскости и механизм для выдвижения поддонов, включающий в себятолкатель, связанный с гибким цепным элементом, размещенным в направляющих,расположенных внутри рамы. Отличие механизированного стеллажа от известного состоит в том, что он снабжен размещеннымина подвесках и приемном столе горизонтальными направляющими для контактирования с толкателем и тремя убирающимисяопорами, закрепленными на раме на уровнеприемного стола, для контактирования сподвесками, при этом толкатель выполнен срабочей поверхностью в форме ласточкинахвоста, а поддон - с обоймой, имеющей пазответной формы для захода в него рабочейповерхности толкателя при вертикальномперемещении подвесок. Цель изобретения - повышение надежности. На рис. 1 показан механизированныйстеллаж, вид спереди; на рис. 2 - то же, видсбоку; на рис. 3 - механизм извлечения иустановки ящиков; на рис. 4 - сечение А-Ана рис. 4; на рис. 5 - сечение Б-Б на рис. 3;на рис. 6 - сечение В-В на рис. 3. Механизированный стеллаж состоит израмы 1. обшитой листовым материалом с окном 2 и приемным столом 3. Внутри рамы1 установлен механизм 4 извлечения и установки ящиков 5 с поддонами 6. Привод 7 стеллажа состоит из электродвигателя 8, редуктора 9 и цепной передачивзаимодействующей с приводным валомна котором сидят приводные звездочки12 и 13, взаимодействующие в свою очередь с тяговыми цепями 14 и 15. Приводнойвал 11 соединен шестеренчатой передачей16 с приводным валом 17 на котором сидятведомые звездочки 18 и 19. Натяжные звездочки 20 и 21 цепей 14 и15 и натяжные ведомые звездочки 22 и 23 установлены в общей каретке 24. Приводные цепи 14 и 15 и ведомые цепи 25 и 26объединены шарнирно рычагами 27,28 и 29.Рычаг 29 снабжен ползушкой, на которой закреплена подвеска 30 с поддоном 6 иящиком 5. Механизм 4 извлечения и установкиящиков 5 с поддонами 6 выполнен в видеприводного гибкого звена, например, втулочно-роликовой цепи 31, приводимой в движение ползушкой 32 по направляющим33, 34 и 35. Направляющие 33 одновременно являются корпусом механизма 4, направляющие 34 установлены в подвесках 30, анаправляющие 35 - на приемном столе 5. Ползушка 32 через гайку 36 связана сприводным винтом 37, сидящим в подшипниках 38 и 39. Втулочно-роликовая цепь 31 шарнирносвязана с толкателем 40, выполненным, например, в форме ласточкина хвоста, и перемещающимся вместе с втулочно-роликовойцепью 31 по направляющим 33, 34 и 35, аподдон 6 ящика 5 снабжен обоймой 41 длявзаимодействия с толкателем 40 втулочно-роликовой цепи 31. Приводной винт 37 через муфту 42 связан с электродвигателем 43. Для ограничения хода гайки 36 предусмотрены конечные выключатели 44 и 45. Ящик 5 снабжен набором пластин 46для набора кода для остановки привода 7 стеллажа по сигналу кодосчитывателя (непоказан). Три убирающиеся опоры механизма 4 извлечения и установки ящиков 5 расположеныв горизонтальной плоскости, выполнены в виде штырей 47, взаимодействующих с магнитами 48, 49 и 50, и предназначены дляудержания подвесок 30. Для втягивания штырей 47 перед началом поиска нужного ящика магнит 48 связансо штырем 47 через вилку 51, магниты 49 и50 с двумя другими штырями 47-напрямую. Поддоны 6 снабжены полозьями 52 и 53 для осуществления движения поддонов понаправляющим 54 и 55, установленным в подвесках 30, и направляющим 56 и 57, установленным на приемном столе 5. Механизированный стеллаж работает следующим образом. От электродвигателя 8 привода 7 через редуктор 9 и цепную передачу 10 вращениепередается на приводной вал 11 со звездочками 12 и 13, а через шестеренчатую передачу 16 - на приводной вал 17 созвездочками 18 и 19. Поскольку передаточное отношение шестеренчатой передачи 16равно1:1,а звездочки 12 и 13, 18 и 19 выполнены одного диаметра, то цепи 14 и 15, 25 и 26 перемещаются синхронно. Соответственно натяжное устройство, установленное в каретке 24 и включающее Звездочки20 и 21, 22 и 23, выполненные одного диа метра с приводными звездочками 12 и 13,18и 19, вращается с той же скоростью. Система рычагов 27, 28 и 29 обеспечивает параллельное перемещение подвесок 30 слежащими на них поддонами 6 с ящиками 5. Для остановки и извлечения нужного ящика 5 из стеллажа на приемный стол 3набирают соответствующий код и кодосчитыватель отыскивает необходимый ящик. Электромагниты 49 и 50 напрямую, а электромагнит 48 через вилку 51 выдвигаюттри штыря 47, на которые садится подвеска 30 с найденным ящиком 5. Таким образом фиксируют положение подвески 30 от вертикальных перемещений. Перемещениеподвески 30 в горизонтальной плоскости ограничено направляющими 33 и 35, которые вместе с направляющими 34 создают единую направляющую для перемещения толкателя 40 механизма 4 извлечения иустановки. Если команды на извлечение ящика 5 откодосчитывателя нет, то подвески 30 перемещаются относительно толкателя 40 не задерживаясь, т.е. толкатель 40проскальзывает через обойму 41 беспрепятственно. Как только от кодосчитывателя поступает команда на остановку требуемого ящика 5 у окна 2, электромагниты 48,49 и 50выдвигают три штыря 47 и фиксируют подвеску 30 от вертикального перемещения. При остановке подвески 30 поддон 6 с установленным на нем ящиком 5 будет жесткосвязан толкателем 40 через обойму 41. Приостановке подвески 30 включается электродвигатель 43 и через муфту 42 начинает вращать приводной винт 37, сидящий вподшипниках 38 и 39, тем самым приводя вдвижение вдоль приводного винта 37 гайку36, которая в свою очередь приводит в движение по направляющим 34 ползушку 32.Ползушка 32 связана с втулочно-роликовой цепью 31 (выполняющей функцию гибкого приводного звена), которая ступенчатым концом толкателя 40, выполненным в формеласточкина хвоста, входит в зацепление собоймой 41 поддона 6. Совместное перемещение толкателя 40 по направляющим 33,34 и 35 и поддона 6 на фторопластовых полозьях 52 и 53 по направляющим 54 и 55,56 и 57 осуществляют в зависимости от направления движения гайки 36 либо на приемный стол 3, либо на подвеску 30. Крайниеположения гайки 36 ограничены конечнымивыключателями 44 и 45. Технико-экономическая эффективность использования предлагаемого механизированного стеллажа позволяет ликвидироватьручную операцию выдачи поддона с ящикоми установки его на место, что значительноповышает удобство его эксплуатации и безопасность для работающего. Предлагаемоетехническое решение может служить основой для создания гибкой переналаживаемой системы.
Рис. 1
Рис. 2
Рис. 3
Рис. 4 Рис. 5
Рис. 6 |
|
Преимущества перед известными аналогами Повышение надёжности |
|
Стадия освоения Опробовано в условиях опытной эксплуатации |
|
Результаты испытаний Соответствует технической характеристике устройства |
|
Технико-экономический эффект Позволяет ликвидировать ручную операцию выдачи поддона с ящиком и установки его на место, что повышает на 25% удобство его эксплуатации и безопасность для работающего. |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 02.12.2004 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии