ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 08-035-04 |
||
|
Наименование проекта Система управления движением по курсу двухгусеничной машины |
||
|
Назначение Совершенствование конструкций дорожно-строительных машин |
||
|
Рекомендуемая область применения Машиностроение |
||
|
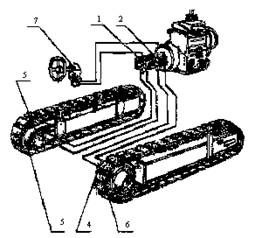
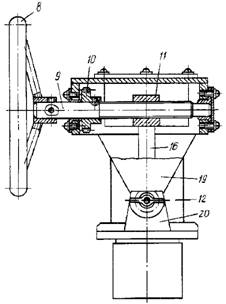
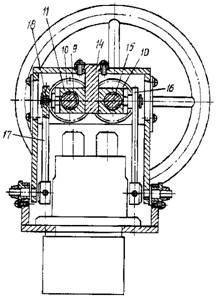
Описание Результат выполнения конструкторской разработки. Система управления движением по курсу двухгусеничной машины представлена рисунками: рис. 1 - общая схема управления, рис. 2 - общий вид рулевого механизма, рис. 3 - вид сбоку рис. 2.
Рис. 1
Предназначена для использования в дорожно-строительных машинах, а также тракторах, кранах и др. устройствах. Система управления состоит из двух насосов переменной производительности 1 и 2 и гидромоторов 3 и 4, образующих с гидронасосами два раздельных гидростатических привода, гусеничных движителей 5 и 6, в которые встроены гидромоторы и рулевой механизм управления 7, состоящий из рулевого колеса 8, валиков 9 и 15, двух шестерен 10, установленных на этих валиках и находящихся в зацеплении, двух гаек 11, установленных на резьбовых участках валиков 9 и 15 и связанных посредством 2-х пальцев 18 с рычагами 16 и 17, управляющими двумя гидрораспределителями блока управления 12. Рулевой механизм управления работает следующим образом: при повороте рулевого колеса 8 благодаря паре шестерен 10, находящихся в зацеплении, валы 9 и 15 вращаются в противоположные стороны и установленные на них гайки 11 вследствие взаимодействия с направляющей 14 движутся также в противоположные стороны, увлекая за собой через пальцы 18 рычаги включения 16 и 17 гидрораспределителей блока управления 12. Гидромоторы и связанные с ними гусеничные движители движутся с разными скоростями и таким образом обеспечивают поворот машины. Поступательное движение машины (см. фиг. 4) обеспечивается поворотом кронштейнов 20 с закрепленным на нем блоком управления 12 при неподвижном кронштейне 19, при этом рычаги управления 16 и 17 отклоняются на одинаковый угол, обеспечивая равенство скоростей поступательного движения правого и левого движителей. В случае закрепления неподвижно кронштейна 20 с установленным на нем блоком управления 12 поступательное движение машины (фиг. 5) обеспечивается поворотом кронштейна 19 с закрепленным на нем механизмом управления, при этом рычаги управления 16, 17 также отклоняются на одинаковый угол, обеспечивая равенство скоростей поступательного движения правого и левого движителей. Поворот машины при этом обеспечивается вращением рулевого колеса 8 описанным выше образом. Применение описанной системы управления позволяет обеспечить плавный разворот машины, улучшить условия эксплуатации машины и условия труда водителя, повысить качество выполняемых дорожных работ. |
||
|
Преимущества перед известными аналогами Улучшенная и упрощенная конструкция системы управления движением дорожно-строительных машин |
||
|
Стадия освоения Внедрено в производство |
||
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
||
|
Технико-экономический эффект Улучшение качества дорожного полотна, повышение производительности труда в 1,1 раза, повышение срока службы машин |
||
|
Возможность передачи за рубеж Возможна передача за рубеж |
||
|
Дата поступления материала 21.06.2004 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии