ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 08-035-02 |
|
Наименование проекта Новый движитель для вездеходных машин |
|
Назначение Для применения в транспортных и тяговых машинах высокой проходимости |
|
Рекомендуемая область применения Транспортное машиностроение |
|
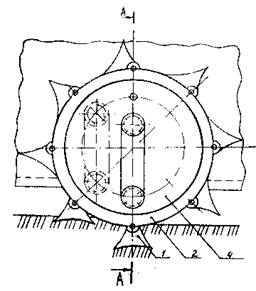
Описание Результат выполнения НИР. Использование автомобильного транспорта в условиях бездорожья, особенно в весенне-летний период, когда оттаивает болота, недостаточно эффективно, а иногда и невозможно. Это связано с недостаточной проходимостью колёсного движителя в данных дорожных условиях. В настоящее время для решения данной проблемы широко используются быстроходные гусеничные машины. Известно, что гусеничный движитель обладает более высокой проходимостью по грунтам с малой несущей способностью по сравнению с колесным движителем. Однако, даже быстроходные гусеничные машины не всегда могут обеспечивать необходимые транспортные перевозки, поэтому во многих регионах России доставка грузов в указанные районы может осуществляться только с помощью вертолетов. В данной работе предлагается конструкция нового типа движителя для транспортных и тяговых машин высокой проходимости. Предлагаемая конструкция движителя позволяет создавать тяговые и транспортные машины, способные работать в режиме перекатывающегося движителя на суше, в режиме гребного колеса на воде и в переходном режиме в заболоченной местности с участием корпуса машины специальной формы, обеспечивающего образование воздушной подушки.
Рис. 1. Движитель для транспортных и тяговых машин высокой проходимости. Движитель (рис. 1 и 2) выполнен в виде башмаков 1, соединенных торсионными валами 18 с корпусом 2 опорно-приводного устройства. Внутри корпуса 2 закреплены направляющие кольца 3 цевочного зацепления и крышки 4. соединенные между собой шпильками 5. Приводной узел, обеспечивающий вращение движителя, выполнен с внутренним цевочным зацеплением и включает в себя звездочку 6 с двумя венцами, свободно установленную на оси 7 и опирающуюся через подшипники 8 на корпус 2. Ось 7 соединена с корпусом вертикальной стойки 9, во внутренней полости которой размещена цепная передача 10. Последняя приводится во вращение валом 11 от мотор-редуктора (на рис. 2 не показан) к ведомой звездочке 12, а далее через вал 13 приводного узла к приводной звездочке 6. В зависимости от поверхности, по которой движется машина, стойка может занимать одно из двух рабочих положений, указанных на рис. 3 и 4. Эта возможность позволяет адаптировать движитель машины к условиям движения (суша, вода, болото). В положении i стойка 9 обеспечивает максимальный клиренс при движении машины по суше. В положении ii стойка обеспечивает верхнее положение приводной звездочки, что повышает КПД движителя при движении машины на воде.
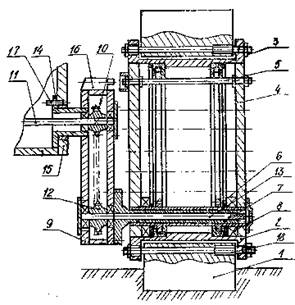
Рис. 2. Движитель для транспортных и тяговых машин высокой проходимости (разрез А - А по рис. 1.) В зависимости от поверхности, по которой движется машина, положение стоек 9 и кинематика приводного узла различны. При движении по суше опорные стойки 9 повернуты вниз. Движение машины осуществляется по схеме, представленной на рис. 3. При переходе машины с суши на воду для увеличения КПД движителя опорные стойки поворачиваются в опорах 14 на 180° (рис. 4), для чего необходимо зафиксировать обод движителя 4 относительно корпуса 15 стопорами 16 и включить привод движителя. Приводные звездочки 6, обкатываясь по кольцам 3 цевочного зацепления, переведут стойки 9 в верхнее положение, которое фиксируется стопорами 17. При отключении фиксаторов 16 обода движителя 4 крутящий момент подводится к корпусам 2 опорно-приводного устройства, что обеспечивает движение машины по воде. Для контроля за положением стоек 9 необходимо использовать специальные датчики (концевые выключатели). В случае выхода машины на сушу все операции выполняются в обратной последовательности. Для этого необходимо расстопорить опорные стойки 9 от фиксаторов 17, застопорить обод Движителя. 2 стопорами 16 и включить привод звездочек 6. При этом стойки 9 повернуть с последующей их фиксацией стопорами 17 в нижнем положении. Далее необходимо расстопорить обод движителя 2 от корпуса 15 машины с помощью стопоров 16. После этого движитель готов к работе для движения машины по суше. В случае движения машины по болоту в процессе движения участвует и корпус 15 с подключением системы формирования воздушной подушки и автоматической системы слежения (следящей системы обеспечения движения). При этом движитель работает в переходном режиме. Новая конструкция движителя обеспечивает движение машины по местности практически в любых условиях (суша, вода, болото). |
|
Преимущества перед известными аналогами Новыя конструкция движителя |
|
Стадия освоения Способ (метод) проверен в лабораторных условиях |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Повышение прозодимости транспортных машин, тяговых усилий в 2,5 раза, экономический эффективности в 2-3 раза |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 18.02.2002 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии