ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 05-038-01 |
|
Наименование проекта Робастная система управления |
|
Назначение Системы автоматического управления, параметры которых - неизвестным образом меняющиеся в известных диапазонах величины. |
|
Рекомендуемая область применения Системы автоматического управления гидромелиоративными сооружениями, движущимися объектами (летательными аппаратами, судами, транспортными и манипуляционными роботами и т. п.). |
|
Описание Результат выполнения научной работы. Рассматривается объект управления (ОУ), описываемый уравнениями:
где
для известных гурвицевой матрицы
Формируется обобщённый выход (ОВ):
где
В задаче стабилизации используется неявная эталонная модель, в установившемся режиме имеющая вид:
где
Применяется робастный регулятор (РР), синтезированный в виде:
g1<>2<>3<> Можно показать, что в системе (1), (3), (4) обеспечивается выполнение целевого условия
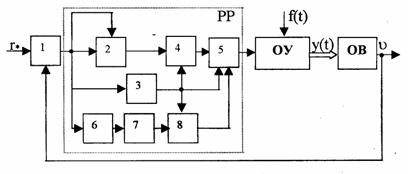
Система (1), (3), (4) представлена на рисунке
где 1, 5, 8 - сумматоры,
3 - дискриминатор знака 6 - блок нахождения модуля "скалярная связь, _векторная связь, 7 - блок нелинейного степенного преобразования Прототипом рассматриваемого изобретения является самонастраивающаяся система управления (авторское свидетельство СССР № 101940, клg05b13/02, 1985), недостатком которой является ограниченность функциональных возможностей, связанная с потерей работоспособности в случае управления нестационарными объектами. Отметим, что предложенная система за счет введения в структуру робастного регулятора слагаемого обладает лучшим качеством управления, по сравнению с робастной системой управления (патент РФ № 2156993, клg05b13/02, 2000 г.). Отличие рассматриваемой робастной системы от известных теоретических разработок заключается в том, что структура регулятора не содержит процедуры деления временных функций и, следовательно, не требует введения дополнительных «страхующих» элементов, исключающих деления на нуль. |
|
Преимущества перед известными аналогами Сохранение устойчивости и качества управления при параметрических вариациях математической модели объекта. |
|
Стадия освоения Способ (метод) проверен в лабораторных условиях |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Повышение устойчивости управляемой системы на 10%. |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 04.10.2001 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии