ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 08-005-01 |
|
Наименование проекта Конвейер цепной |
|
Назначение Транспортирование литейных опок и полуформ по отдельным участкам литейных цехов |
|
Рекомендуемая область применения Транспортное машиностроение, литейное производство |
|
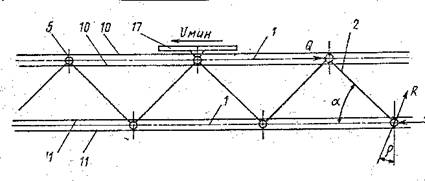
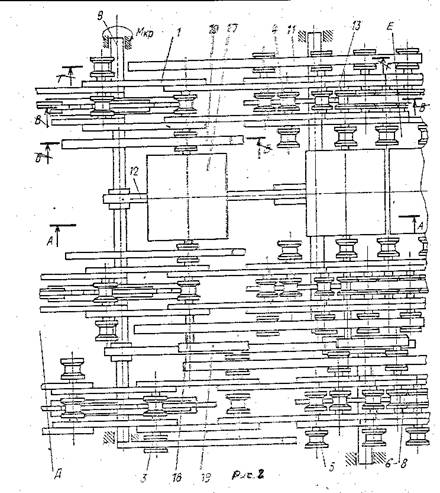
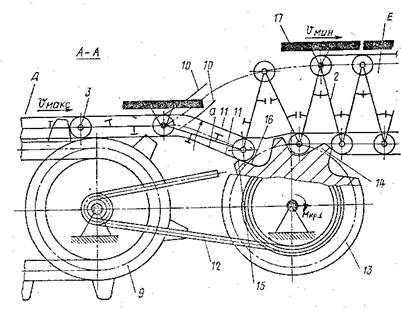
Описание Результат выполнения конструкторской разработки. Конвейер состоит из бесконечно-замкнутых цепей 1 со звеньями 2, соединенными между собой пальцами 3 с опорными колесами 4 и отклоняющими роликами 5, которые перемещаются по направляющим 6 - 8. Кроме того, конвейер включает приводной, механизм со звездочками 9 и механизм изменения скорости с опорными отклоняющими поверхностями 10 и 11. Механизм изменения скорости выполнен в виде связанных с приводным механизмом посредством передаточного элемента 12 дополнительных звездочек 13 с зубьями 14, которые взаимодействуют с опорными колесами 4, причем, одна из опорных отклоняющих поверхностей 11 расположена по линии касания 15 в начальный момент опорного колеса 4 с рабочей поверхностью 16 зубьев 14. Конвейер имеет высокоскоростной участок Д и низкоскоростной участок Е. Транспортируемые объекты 17 расположены на осях 18, являющихся одновременно пальцами 3 цепей 1. Между ближайшими цепями 1 на концах осей 18 жестко закреплены кривошипы 19. Конвейер работает следующим образом. Звенья 2 всех трех цепей 1 на высокоскоростном участке Д вытянуты в линию и приводятся в прямолинейное равномерное движение единым приводным механизмом. Складывание звеньев 2 цепей 1 в гармошку начинается с того, что отклоняющие ролики 5 с обеих сторон каждой из цепей 1 входят в соответствующие опорные отклоняющие поверхности 10 и 11. Нижними поверхностями 11 отклоняющие ролики 5 направляются вниз к дополнительным звездочкам 13, при этом опорные колеса 4, находящиеся с отклоняющими роликами 5 на общих пальцах 3, выходят из зацепления с единым приводным механизмом и из направляющих 6. Работа дополнительных звездочек 13 синхронизируется передаточным элементом 12, который не только передает от единого приводного механизма на них крутящий момент М кр1, но уменьшает линейную скорость зубьев 14 и условно совмещает проекцию рабочей поверхностиaв линию (рис. 3) нижних поверхностей 11 с проекциями рабочих поверхностей 16 в линию зубьев 14. При этом в момент совмещения проекций этих поверхностей соответствующие отклоняющие ролики 5 и опорные колеса 4 должны находиться на линии касания 15 (на рис. 3 линия 15 проецируется в точку). Такое их взаимное мгновенное расположение обеспечивает принудительный ввод опорных колес 4 в зацепление с зубьями 14 дополнительных звездочек 13. С момента начала зацепления начинается сложное движение звеньев 2, несущих впереди себя вошедшие в зацепление опорные колеса 4. Отклоняющие ролики 5, находящиеся у рассматриваемых звеньев 2 сзади и вошедшие в верхние направляющие 10, продолжают поворот звеньев 2 в направлении по часовой стрелке (рис. 3) и замедляют поступательное движение опорных колес 14 по рабочим поверхностям 16 зубьев 14 звездочек 13. Звездочки 13 начинают разворачивать звенья 2 в направлении против часовой стрелки. В результате сложения всех движений звенья 2 продолжают замедленное поступательное движение в сторону низкоскоростного участка Е с одновременным разворачиванием в направлении по часовой стрелке вокруг пальцев 3, несущих опорные колеса 4, находящиеся в зацеплении со звездочками 13. Последующие звенья 2 разворачиваются в направлении против часовой стрелки. Таким образом, пары звеньев 2, находящиеся в шарнирном соединении с помощью пальцев 3, поворачиваются друг к другу, складываясь в гармошку. Звенья 2 складываются, плотно соприкасаясь друг с другом. Звездочки 13, воздействуя своими зубьями на выходящие из зацепления с ними опорные колеса 4, непрерывно и равномерно перемещают звенья 2, сложенные гармошкой, на низкоскоростном участке Е. Отклоняющие ролики 5, продолжая перемещаться в опорных отклоняющих поверхностях 11, задают направление движения опорным колесам 4, вышедшим из зацепления. Вышедшие из зацепления опорные колеса 4 начинают двигаться по нижним направляющим 7, а опорные колеса, расположенные выше, начинают контактировать с направляющими 8, что обеспечивает управляемое движение звеньев 2 на низкоскоростном участке Е. После входа опорных колес 4 в направляющие 7 и 8 необходимость в нижних поверхностях 11 для отклоняющих роликов 5 отпадает. Такое устройство конвейера позволяет в момент сборки звеньев цепей в гармошку устранить влияние производственного сопротивленияqна кинематические пары: отклоняющий ролик - направляющая, а векторы силы производственного сопротивленияqи движущей силыrразместить на одной линии, что устраняет возможность появления реакции r от их действия. Вместе с устранением реакции устраняются и потери на трение качения, возникавшее от нее, что повышает КПД конвейера в целом и снимает ограничения по величине наклона звеньев к направлению движения, позволяет увеличить перепад между наибольшей и наименьшей скоростями транспортируемых объектов и довести число звеньев, собранных в гармошку, до технологически необходимого количества.
Рис. 1. Кинематическая схема цепи, сложенной в гармошку
Рис. 2. План части конвейера в месте складывания звеньев цепей гармошкой
Рис. 3. Кинематическое изображение |
|
Преимущества перед известными аналогами Особенности конструкции конвейера, расширение его технологических возможностей |
|
Стадия освоения Внедрено в производство |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Повышение КПД конвейера в 1,3 раза |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 04.01.2001 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии