ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 05-005-01 |
|
Наименование проекта Адаптивная система управления для объектов с запаздыванием нейтрального типа |
|
Назначение Расширение функциональных возможностей системы управления |
|
Рекомендуемая область применения Системы управления объектами с запаздыванием по состоянию нейтрального типа с целью расширения функциональных возможностей системы, причем параметры объекта - неизвестные постоянные или медленно меняющиеся во времени величины. |
|
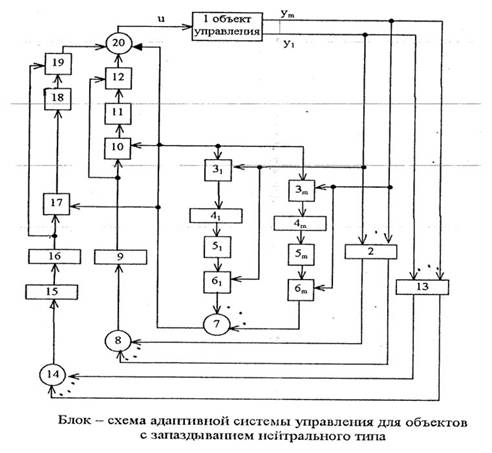
Описание Результат выполнения научно-исследовательской работы Система содержит (см. рис.) объект управления 1, первый блок задания коэффициентов 2, первые умножители 3i(1=1,m) блоки вычисления модуля 4i(1=1,m), первые интеграторы 5i(1=1,m), вторые умножители 6i(1=1,m), первый блок суммирования7, второй блок суммирования8, первый блок запаздывания9, третий умножитель 10, второй интегратор 11, четвертый умножитель 12, второй блок задания коэффициентов 13, третий блок суммирования 14, блок дифференцирования 15, второй блок запаздывания 16, пятый умножитель 17, третий интегратор 18, шестой умножитель 19, четвертый сумматор 20.
Выходы объекта регулирования соединены с соответствующими входами первых и вторых умножителей и с соответствующими входами первого и второго блока задания коэффициентов, выход каждого первого умножителя через последовательно соединенные соответствующие блок вычисления модуля и первый интегратор соединен с входом соответствующего второго умножителя, выходы вторых умножителей подключены к входам первого блока суммирования, выход которого подключен ко вторым входам первых умножителей, ко второму входу третьего умножителя, ко второму входу пятого умножителя и к первому входу четвертого блока суммирования, выход второго блока суммирования соединен с входом первого блока запаздывания, выход первого блока запаздывания подключен к соответствующим входам третьего и четвертого умножителей, выход третьего блока суммирования подключен к блоку дифференцирования, выход которого соединен с входом второго блока запаздывания, вход которого подключен ко второму входу шестого запаздывания, вход которого подключен ко второму входу шестого умножителя и к первому входу пятого умножителя, выходы первого блока задания коэффициентов соединены с входами второго сумматора, а выходы второго блока задания коэффициентов - с входами третьего сумматора, выход третьего умножителя через последовательно соединенные второй интегратор и четвертый умножитель соединен с входом четвертого сумматора, выход пятого умножителя через последовательное соединенные третий интегратор и шестой умножитель соединен также с входом четвертого сумматора. Динамика процессов в объекте управления описывается уравнениями состояния и выхода:
гдеx-n-мерный вектор состояния; y-m-мерный вектор выходных измеряемых координат; u- скалярное управляющее воздействие;
a,d1,d2,l,b- матрицы и вектор размерностей (n*n), (n*n), (n*n), (m*n), (n*l) соответственно, зависящие от вектора неизвестных параметров
К объекту подключен регулятор
гдеg1,x2,x3 - настраиваемые параметры регулятора, вектор и скаляры соответственно. Наиболее близким техническим решением к предлагаемому, является самонастраивающаяся система управления для объектов с запаздыванием. Недостатком этой системы являются узкие функциональные возможности системы, так как система не может работать с объектами, обладающими запаздыванием нейтрального типа и необходимость выбора и задания элементов числового вектора настройки параметров регулятора в условиях априорной неопределенности, что, как правило, представляет собой сложную задачу, решение которой существенно затрудняется с ростом размерности систем управления. В такой ситуации самонастройка вектора параметров является наиболее целесообразным, а в ряде случаев и единственно возможным подходом к построению систем управления, устойчиво работоспособных в условиях априорной неопределенности. Вводя в систему первые умножители, блоки вычисления модуля, первые интеграторы и вторые умножители, второй блок запаздывания, блок дифференцирования, первый блок суммирования, получают в системе новую функцию, которая заключается в том, что теперь система может работать с объектами, обладающими запаздыванием нейтрального типа и элементы числового вектора настройки параметров регулятора будут настраиваться, что обеспечивает условие нормального функционирования системы. |
|
Преимущества перед известными аналогами Аналоги не известны |
|
Стадия освоения Способ (метод) проверен в лабораторных условиях |
|
Результаты испытаний Соответствует технической характеристике изделия (устройства) |
|
Технико-экономический эффект В 1,5 раза расширены функциональные возможности системы управления |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 02.03.2001 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии