ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 24-052-00 |
|
Наименование проекта Устройство высокоточного позиционирования предметного столика электронного микроскопа на основе пьезоэлектрического компенсатора |
|
Назначение Осуществление точного движения по одной координате. |
|
Рекомендуемая область применения При повышенной точности измерений, систематизации результатов. |
|
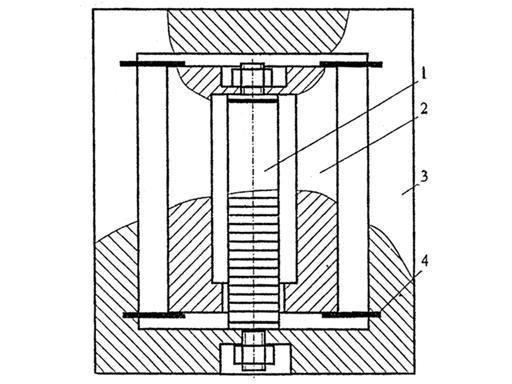
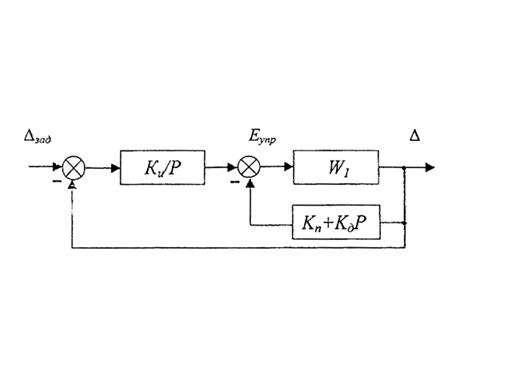
Описание Устройство включает пьезоэлектрический компенсатор 1 (рис.1), подвижную 2 и неподвижную 3 части платформы, элементы 4 упругого демпфирования. Пьезоэлектрический компенсатор, используемый в качестве исполнительного двигателя, выполнен в виде наборного столбика из пьезокерамических шайб толщиной 0,8 мм, стянутых упругим стержнем. Длина столбика - 130 мм, диапазон управляемых перемещений под действием управляющего напряжением ±30 мкм. Как объект управления, пьезокомпенсатор представляет собой колебательное звено со слабым внутренним демпфированием. Подвижная и неподвижная части платформы имеют достаточную механическую жесткость и соединены между собой элементами упругого подвеса, обеспечивающими плоскопараллельное движение частей. Часть неподвижной платформы жестко крепится к существующему в данном электронном микроскопе механизму перемещения предметного столика, приводимому в движение электроприводом или вручную. К подвижной части платформы крепится предметный столик с исследуемым объектом. При построении систем управления пьезокомпенсаторами (рис.2) используют комбинацию жесткой и гибкой корректирующих обратных связей по выходной координате (перемещению). Передаточная функция пьезокомпенсатора w1 в простейшем случае (при отсутствии жестких требований к динамической точности системы) может быть представлена колебательным звеном w1 =
где: d - приращение координаты (изменение линейного размера) пьезокомпенсатора; Е упр - выходное напряжение управляющего преобразователя; Т - постоянная времени пьезокомпенсатора; d - декремент затухания; К - коэффициент передачи; Р - оператор преобразования Ла Пласа. Выбором соответствующих значений коэффициентов К u, К n, К a можно добиться желаемого качества переходных процессов в системе. При необходимости можно реализовать перемещения, величина которых выходит за границы диапазона управляемых перемещений пьезокомпенсатора. Для получения высокоточного движения следует объединить управление электроприводом данной модели микроскопа и управление пьезокомпенсатором в двухканальную систему управления. с. 1.
Рис. 1 Конструкция перемещаемой однокоординатной платформы
Рис.2 Структурная схема системы управления пьезокомпенсатором |
|
Преимущества перед известными аналогами Компенсация погрешности (неравномерности) движения грубого канала традиционного привода, повышена статическая и динамическая точность системы. |
|
Стадия освоения Внедрено в производство |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Снижение трудоемкости; улучшение качества изделий; повышение производительности труда. |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 28.12.1999 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии